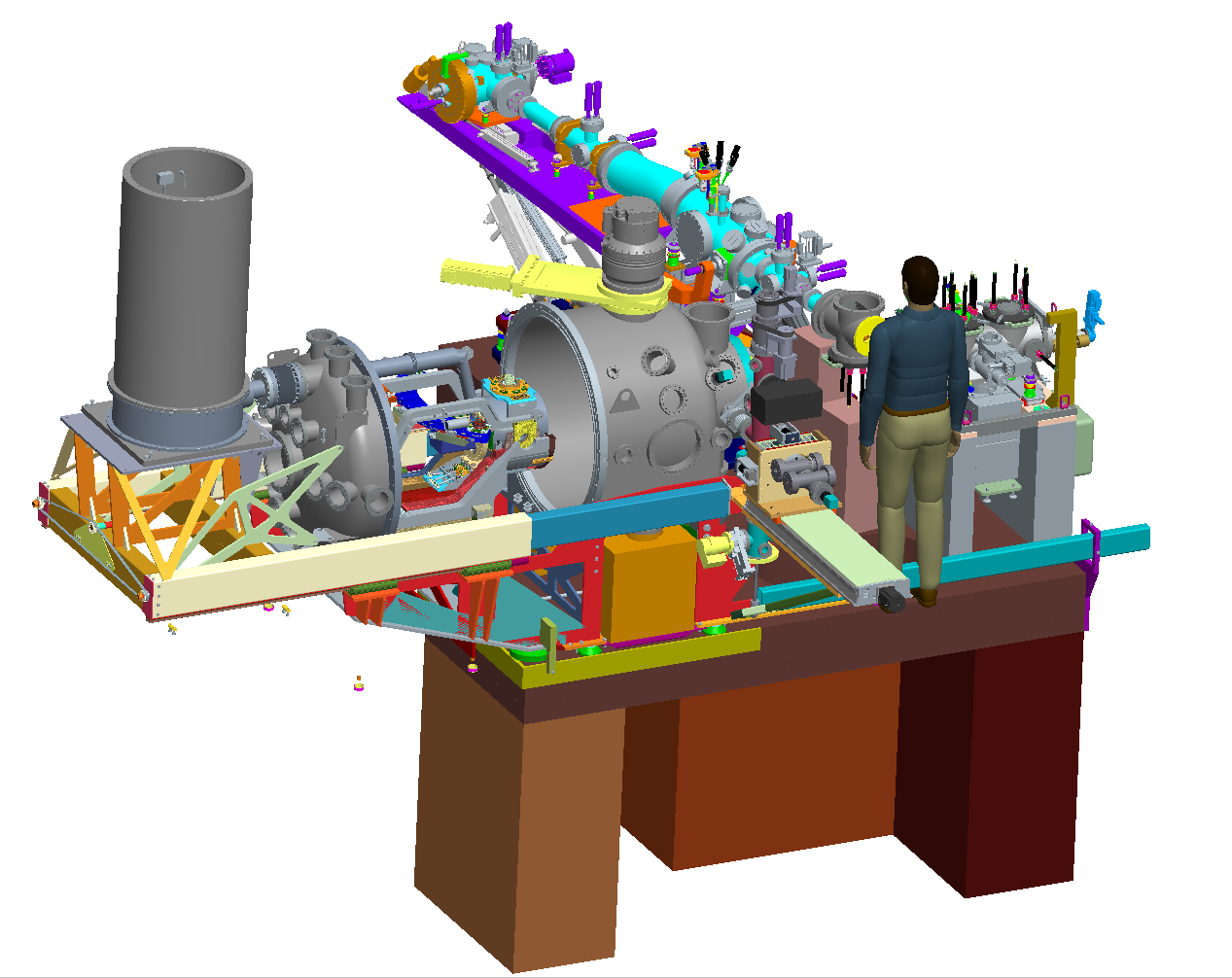
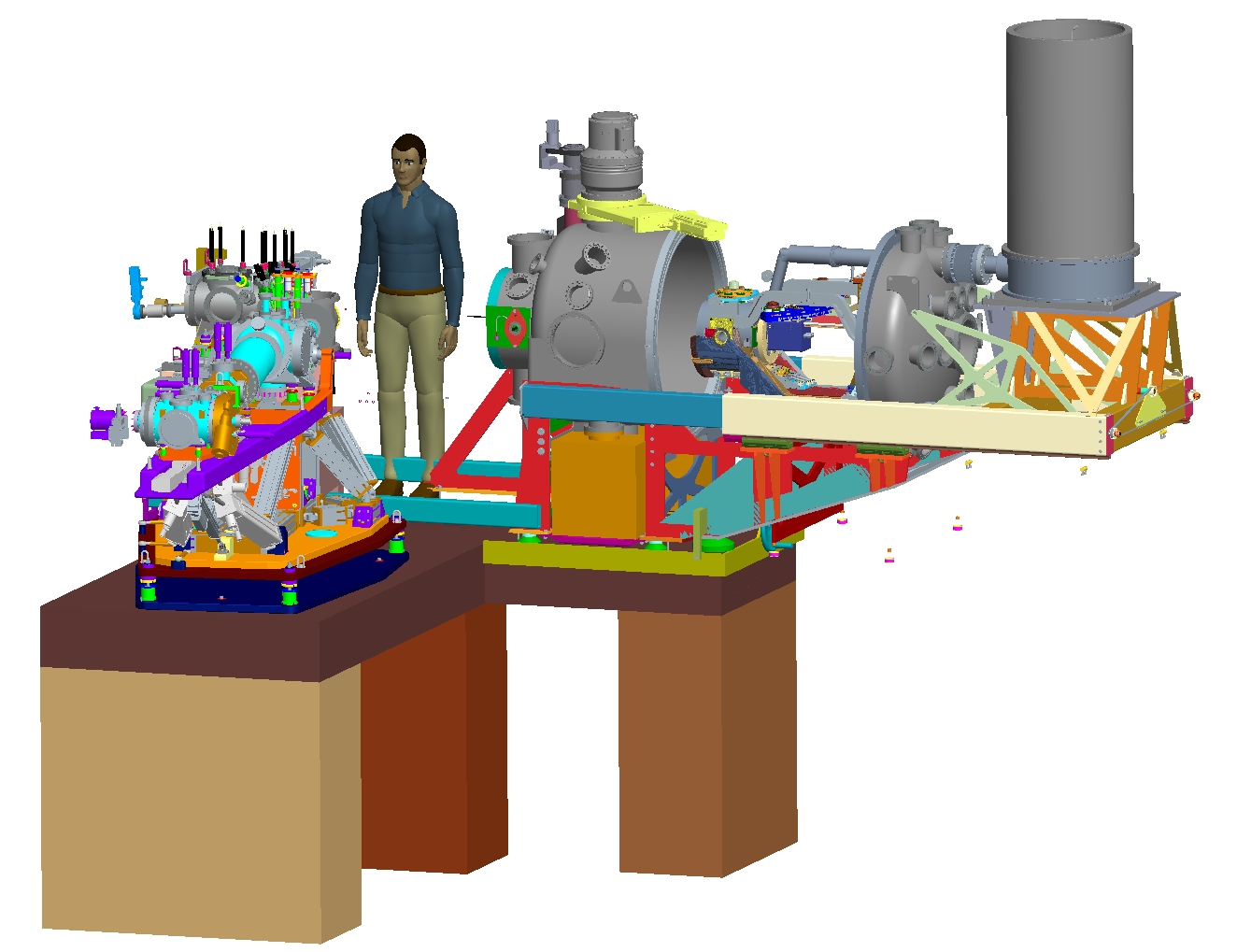
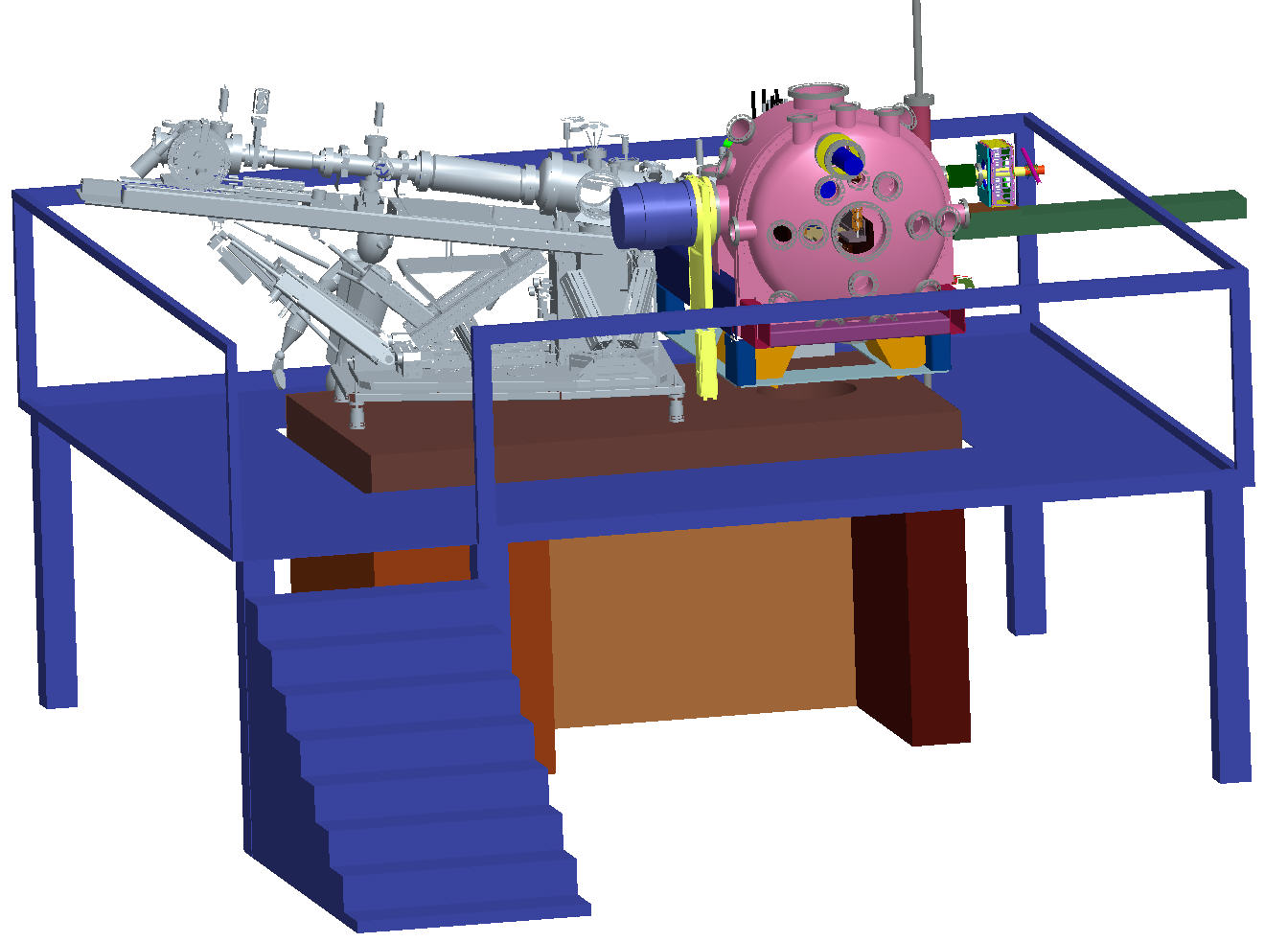
Camera Manipulator (RICXS experiment)
Vacuum / Cleanroom Multi Axes Systems
782441:001.26
 - Vacuum / Cleanroom Multi Axes Systems")



Vacuum multi-axis system
1 Tesla at 10E-8 mbar (UHV), hard X-ray beam, 42 piezo motors
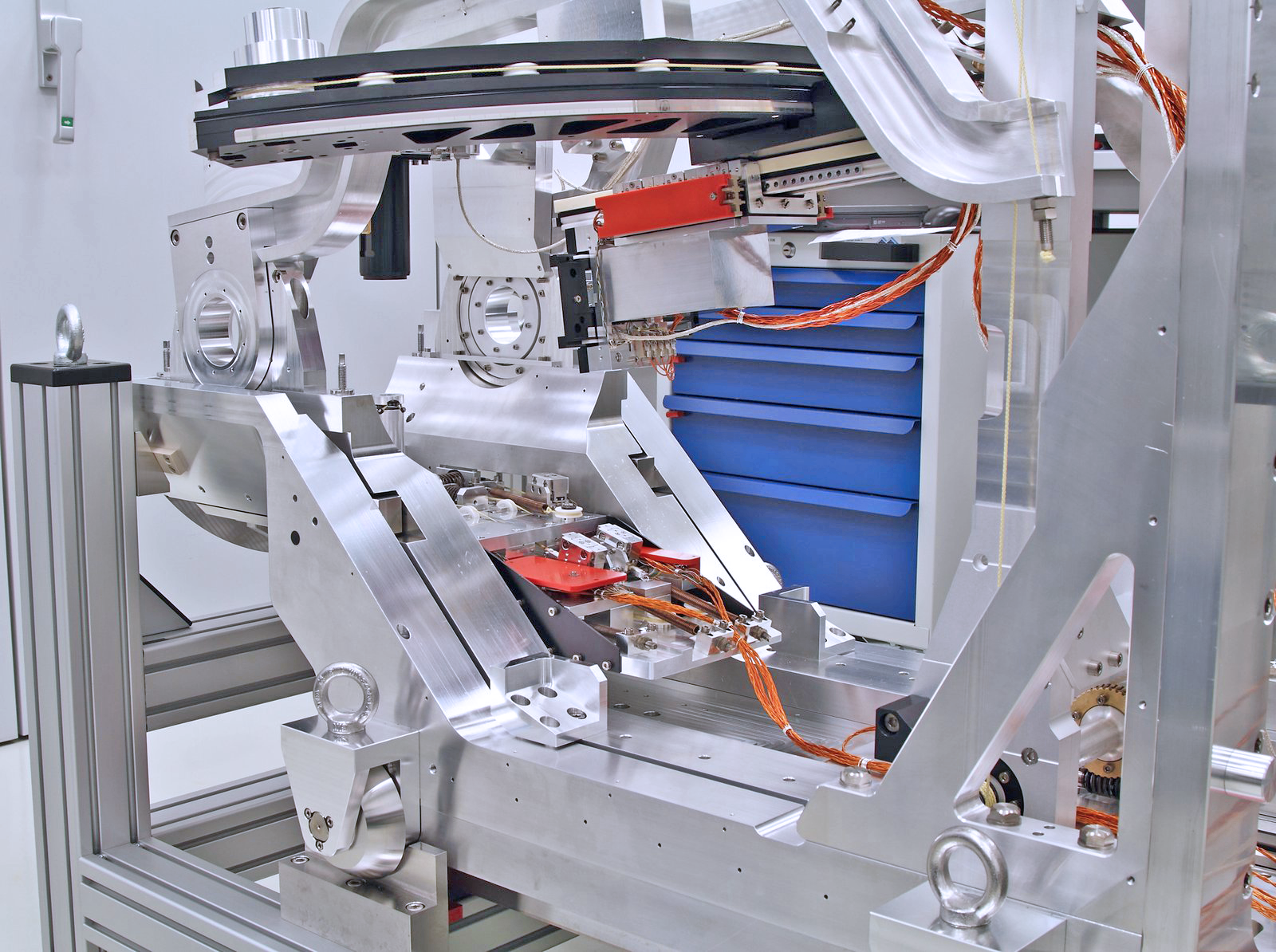
RICXS experiment: (Resonant Inelastic X-ray Scattering) at the Bessy for use in synchrotron radiation research
- Swiveling a camera around super magnets 1T at 10E-8 mbar
- Adjustment of monitoring distance, upstream apertures, samples in the magnet
|
|
|
|
Special features:
|
Operation
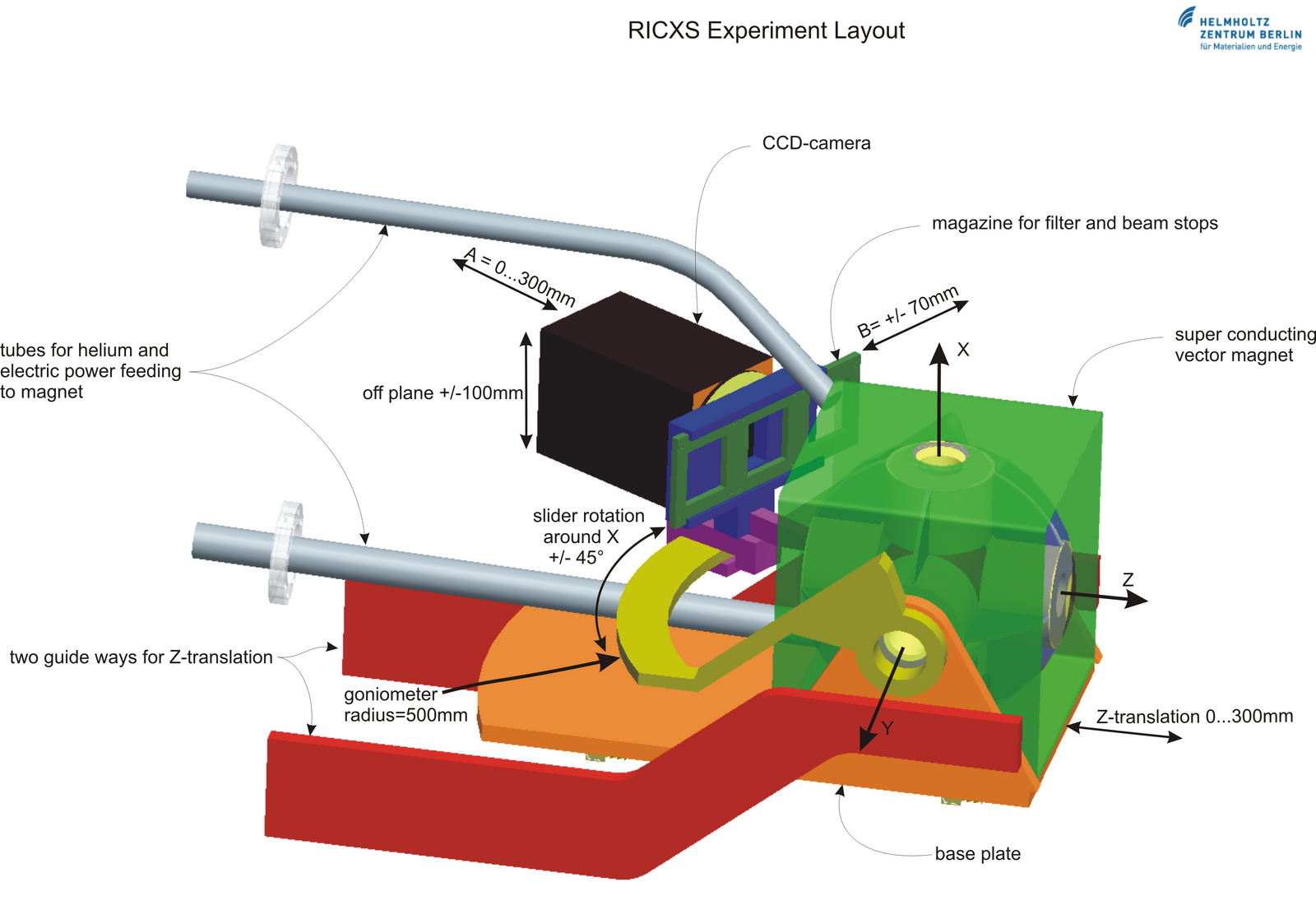
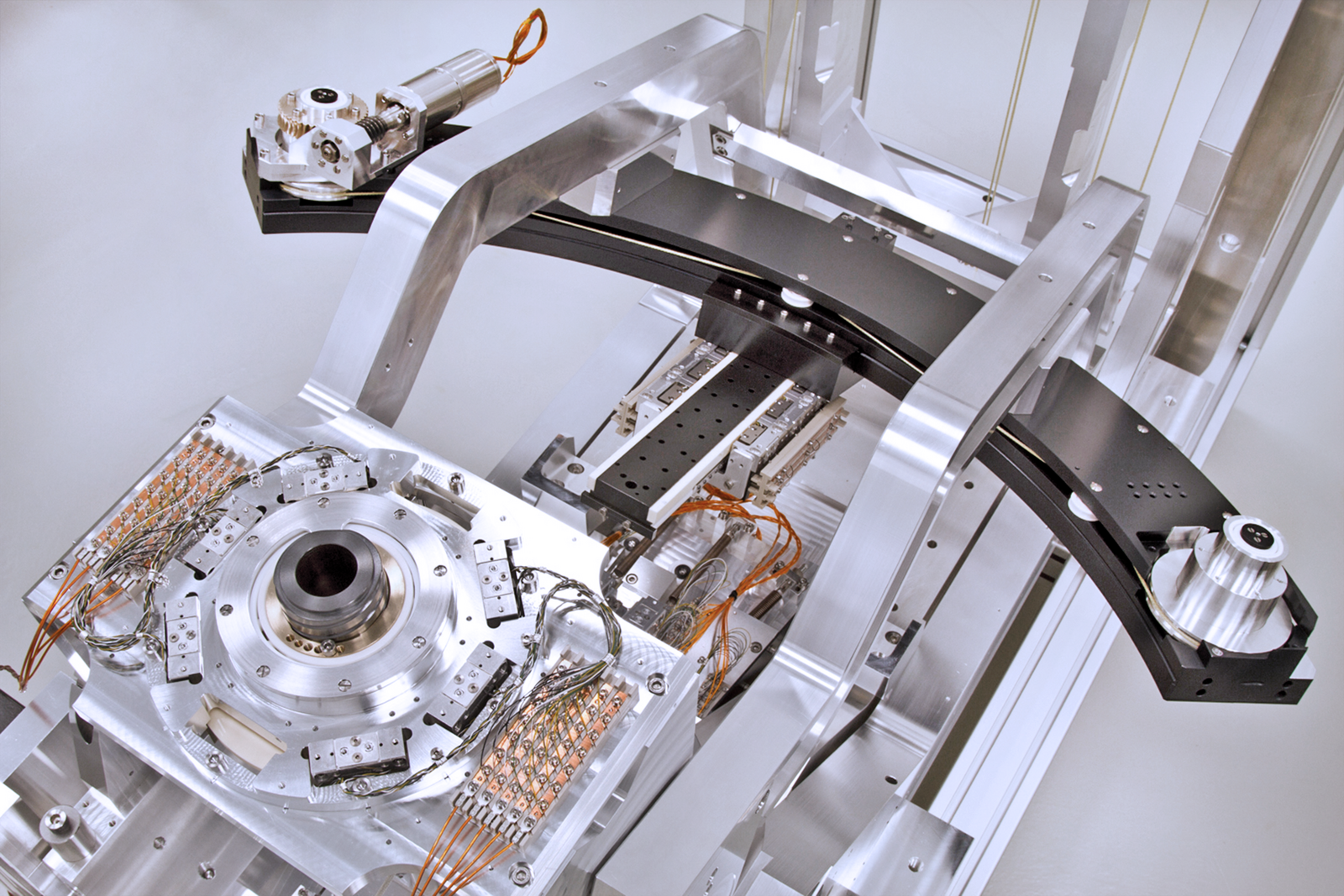
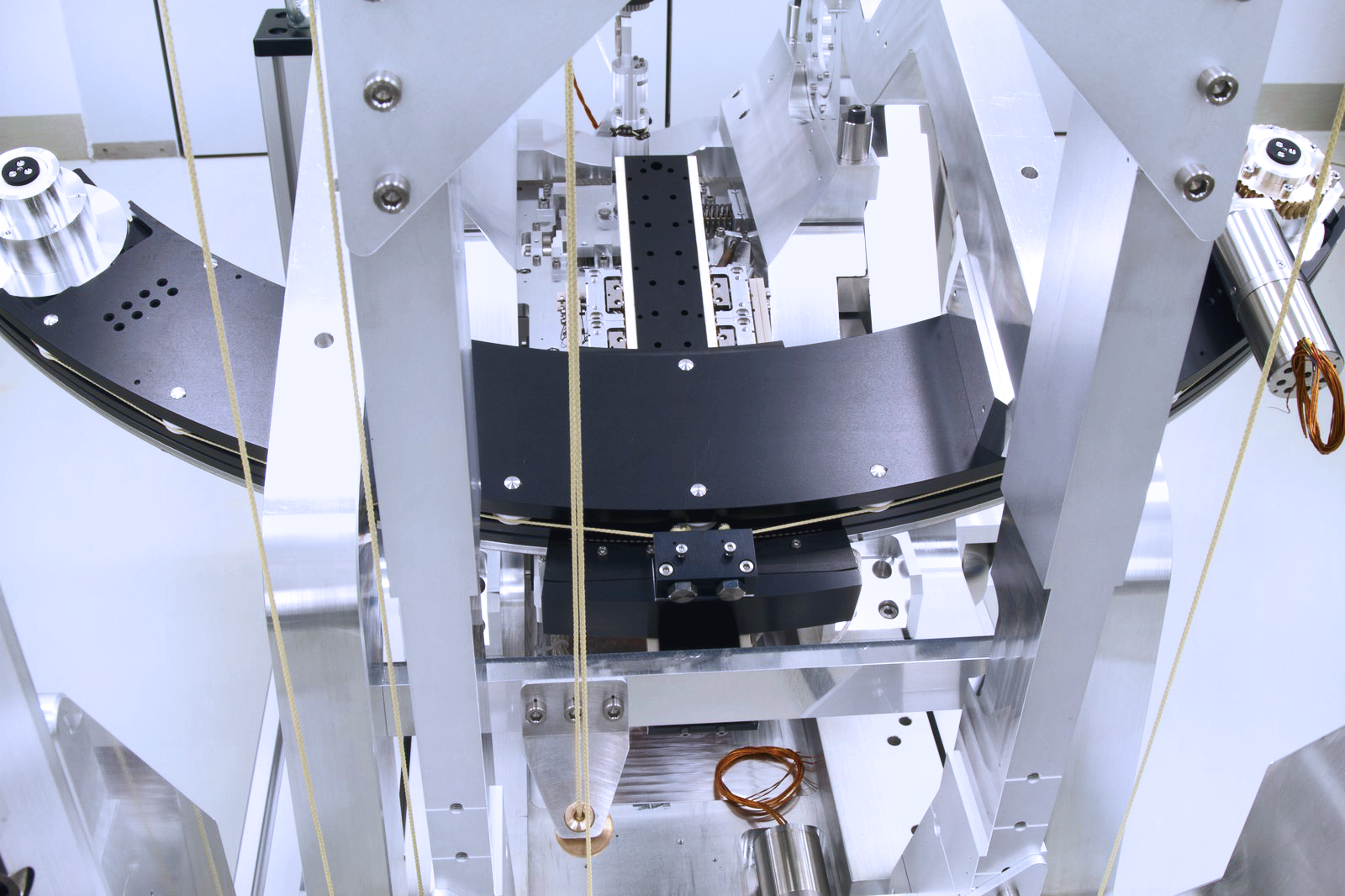
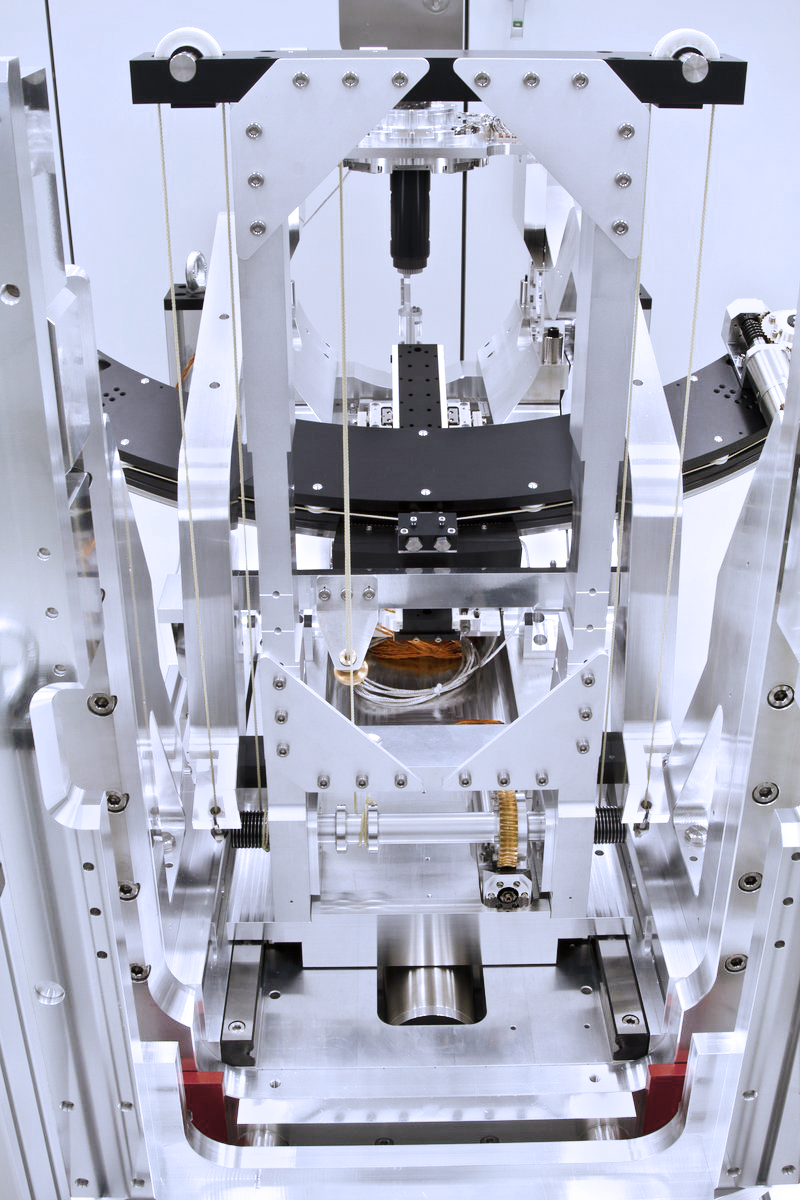
The camera is swiveled around the magnet with the sample in two degrees of freedom and the distance to the swivel center is adjustable. The entire setup can be moved out of the vacuum chamber for maintenance (extreme magnetic field at the magnet at 10E-8 mbar)
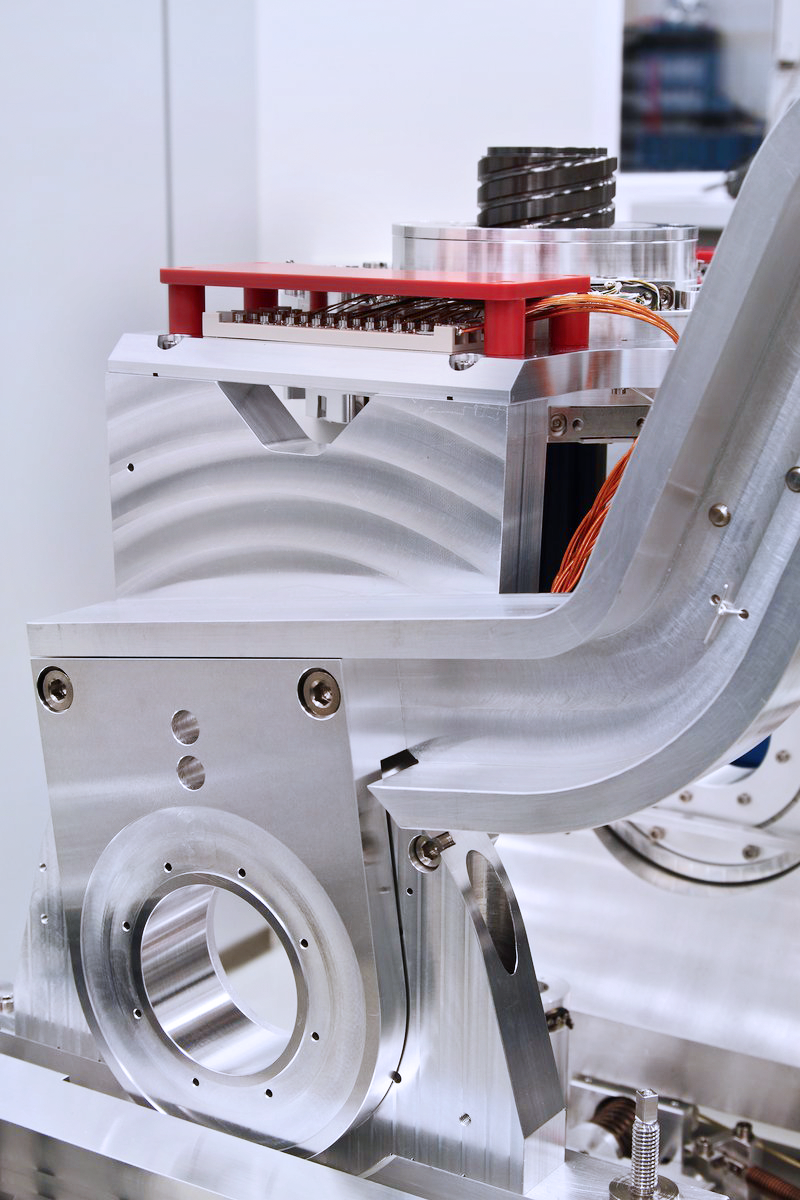
All drives close to the magnet are designed with piezo motors. Several motors are operated in parallel to generate the necessary forces. Such motors are installed in the A-Drive, which moves the camera forwards and backwards, and in the aperture adjuster in front of the camera.
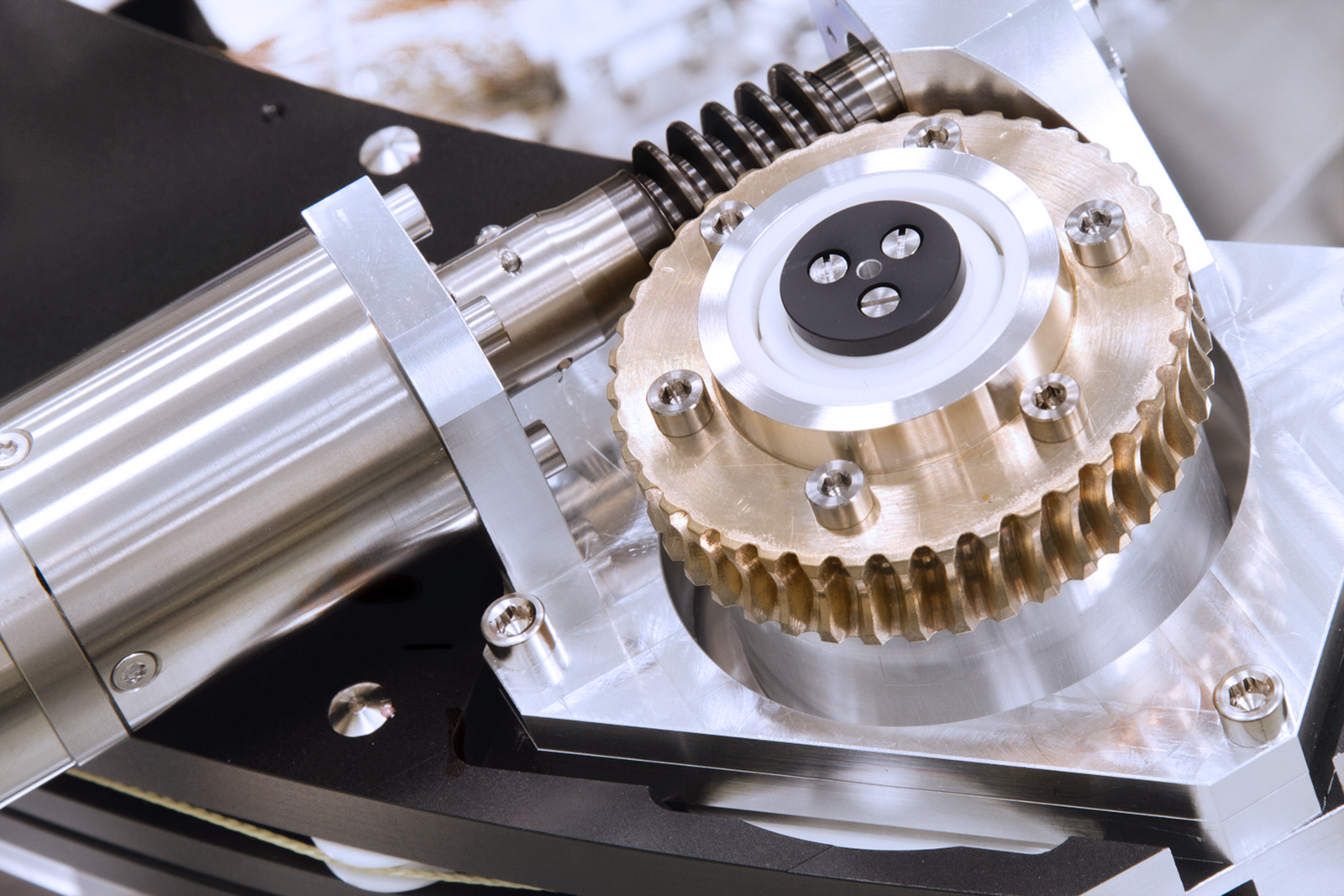
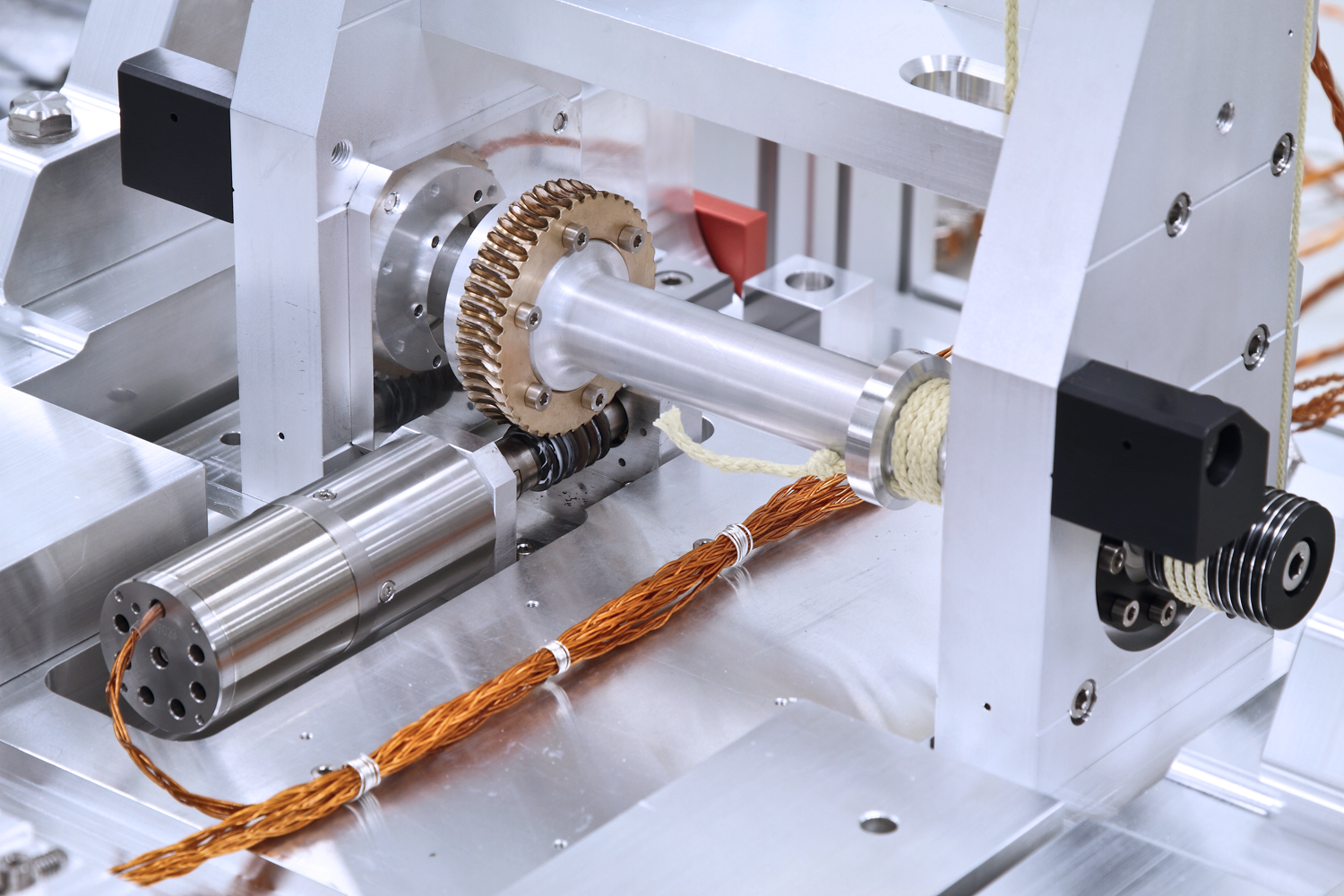
The drives for the swivel movements are positioned away from the magnet so that cost-optimized stepper motors can also be used here. These operate via dry-running worm gears and pulley, which ultimately generate the swivel movement. A curved guide with circumferential PEEK balls had to be developed for this purpose.
Application fields
Magnetic field measurement, research to increase storage density on hard disks, research, product development, visualization of magnetic functions in materials in an active state (you can "watch" magnetism and fundamentally understand magnetism better)
References
About the experiment (external link): https://jlsrf.org/index.php/lsf/article/view/81
Press Release at www.konstruktion-entwicklung.de (external link): https://www.konstruktion-entwicklung.de/magnetismus-an-schaltungen-dreidimensional-sichtbar-machen
| 782441:001.26 | X | Rz | Ry | Xr | y | |
| Motion | Feeding unit | Swivel unit horizontal | Swivel unit vertical | Focus | Aperture | |
| Travel | [mm; deg] | 300 | ± 45 | +5 | -18.5 | 300 | 200 |
| Repeatability unidirectional | [µm; deg] | ± 5 | ± 0,1 | ± 0,1 | ± 0,3 | ± 5 |
| Repeatability bidirectional | [µm; deg] | ± 10 | ± 0,2 | ± 0,2 | ± 1 | ± 10 |
| Positioning speed | [mm/s; deg/s] | 5 | 1 | 1 | 5 | 5 |
| Max. speed | [mm/s; deg/s] | 10 | 2 | 2 | 10 | 10 |
| Max. load | [N] | 2500 | 200 | 200 | 100 | 5 |
| Weight | [kg] | 1110 | ||||
| Lubrication liquid | [mbar] | minimal, up to 10-8 | ||||
| Lubrication dry | [mbar] | up to 10-8 | ||||
| Max. Bakeout temperature | [deg] | 80 | ||||
| Drive | Ball Screw 1432/4.16.398.453BR T7 | Worm Gear, Pulley | Worm Gear, Pulley | |||
| Motor | Stepper Motor | Stepper Motor | Stepper Motor | Piezo Motor | Piezo Motor | |
| Feedback | Linear Scale | Angular Scale | Angular Scale | Linear Scale | Linear Scale | |
| Optional features | custom fluorine-free / PFAS-free UHV lubrication, adapter, bore grid, cable / plugs | |||||
| Variants cleanroom | up to clean room class ISO 6 (higher on request) | |||||
| Variants beam | UV, DUV, EUV, X-ray (gamma on request) | |||||
| Variants magnetism | magnetic, low-magnetic, magnet-free in center | |||||
| Variants vacuum | all ranges up to 10E-8 mbar HV / UHV | |||||



201/5000 Even more axes for your vacuum applications

Almost all atmospheric standard axes are anodized with UHV lubrication for residual pressures up to 10E-6 mbar - or even better - available. Click here for the overview of our standard axes!
Overwiew standard stages Contact technical consultants
Only selected materials, components, and lubricants meet the requirements for low outgassing. In many cases, the use of liquid lubricants is not possible. In addition, the bake-out process places significant stress on the positioning system; thermal stresses occurring at temperatures of up to 140 °C must be taken into account.
All components are designed to be vacuum-compatible and are specially cleaned after manufacturing. Assembly is carried out under cleanroom conditions. For non-magnetic systems, the choice of materials is even more severely restricted.
We offer a wide range of solutions for both UHV systems with the highest performance requirements and non-magnetic assemblies.
The customized adaptation of our positioning systems to existing chambers or setups is carried out in several structured steps. The goal is seamless integration with maximum precision, cleanroom and/or vacuum compatibility, and operational reliability.
Typically, the customization process includes:
- Analysis of the installation situation (available space, interfaces, loads, degrees of freedom, environmental conditions)
- Application-specific alignment with respect to vacuum, cleanroom, magnetism, or radiation requirements
- Mechanical adaptations such as custom adapters, base plates, hole patterns, or installation heights
- Adaptation of drive, measurement, and cabling concepts, including connector routing, feedthroughs, and cable management
- Material and lubricant selection tailored to outgassing behavior, particle requirements, and bake-out conditions
The system design is carried out using 3D design and simulation, optionally complemented by prototypes, functional testing, and cleanroom or vacuum preparation.
Our positioning systems are designed for various cleanroom classes in accordance with ISO 14644-1 and can be adapted to the specific application. As standard, we implement systems for ISO 6 to ISO 4. For particularly demanding custom applications—depending on system concept, motion, materials, and lubrication—cleanroom classes down to ISO 2–1 are also possible.
The achievable cleanroom class depends, among other factors, on:
- the selected mechanics and bearing concept
- the drive and measurement systems used
- materials, surface treatments, and lubricants
- motion profiles and operating conditions, e.g., enclosure and extraction
- multi-level cleaning processes, handling, and commissioning
All cleanroom systems are appropriately prepared, assembled, and final-cleaned in a cleanroom environment. Upon request, we develop custom solutions precisely tailored to the required cleanroom class and application.
Nearly all atmospheric standard axes are available anodized with UHV lubrication for residual pressures down to 10E-6 mbar — or even better. For systems with stepper or piezo motors, we offer the following vacuum preparation:
- All parts vacuum-cleaned
- Liquid lubrication with UHV oil for pressures down to 10-6 mbar
- Maximum bake-out temperature 80 °C
- Equipped with Phytron stepper motors
- Stainless steel components (ball screw, guides, bearings, screws)
- Kapton or PTFE cabling
- Kapton or ceramic Sub-D connectors
- Untreated aluminum surfaces
- Bores and cavities with venting holes, vented screws, or slotted washers
- No covers
- Assembled in our cleanroom
- Final cleaned
- Delivered in evacuated, double plastic packaging
Click here for more systems:
Overview of our standard axes

Elger Matthes
Consulting, Concepts, Innovation & Engineering
T +49 351 88585-82
E-Mail
