6-Achs Miniatur-XYZ-Theta-Phi-Delta Positioniersystem (Reinraum ISO 5) | Tripod, Drehtisch, XY- Stage, Hexapod Alternative | Hub XYZ 30 x 30 x 20 mm, RxRy 4°, Rz 360°
XYZ Tip-Tilt System
786015:009.26
 | Tripod, Drehtisch, XY- Stage, Hexapod Alternative | Hub XYZ 30 x 30 x 20 mm, RxRy 4°, Rz 360° - XYZ Tip-Tilt System")
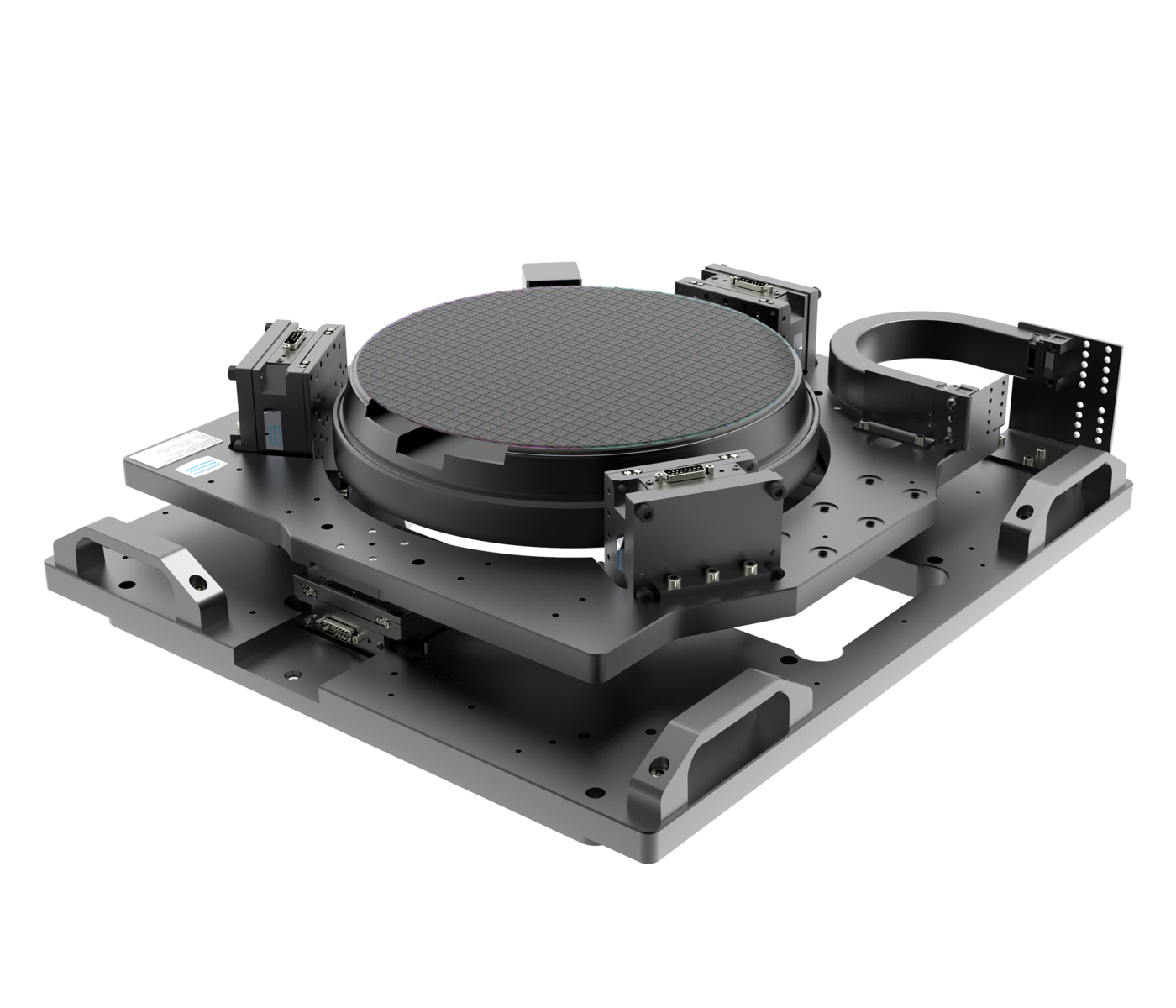
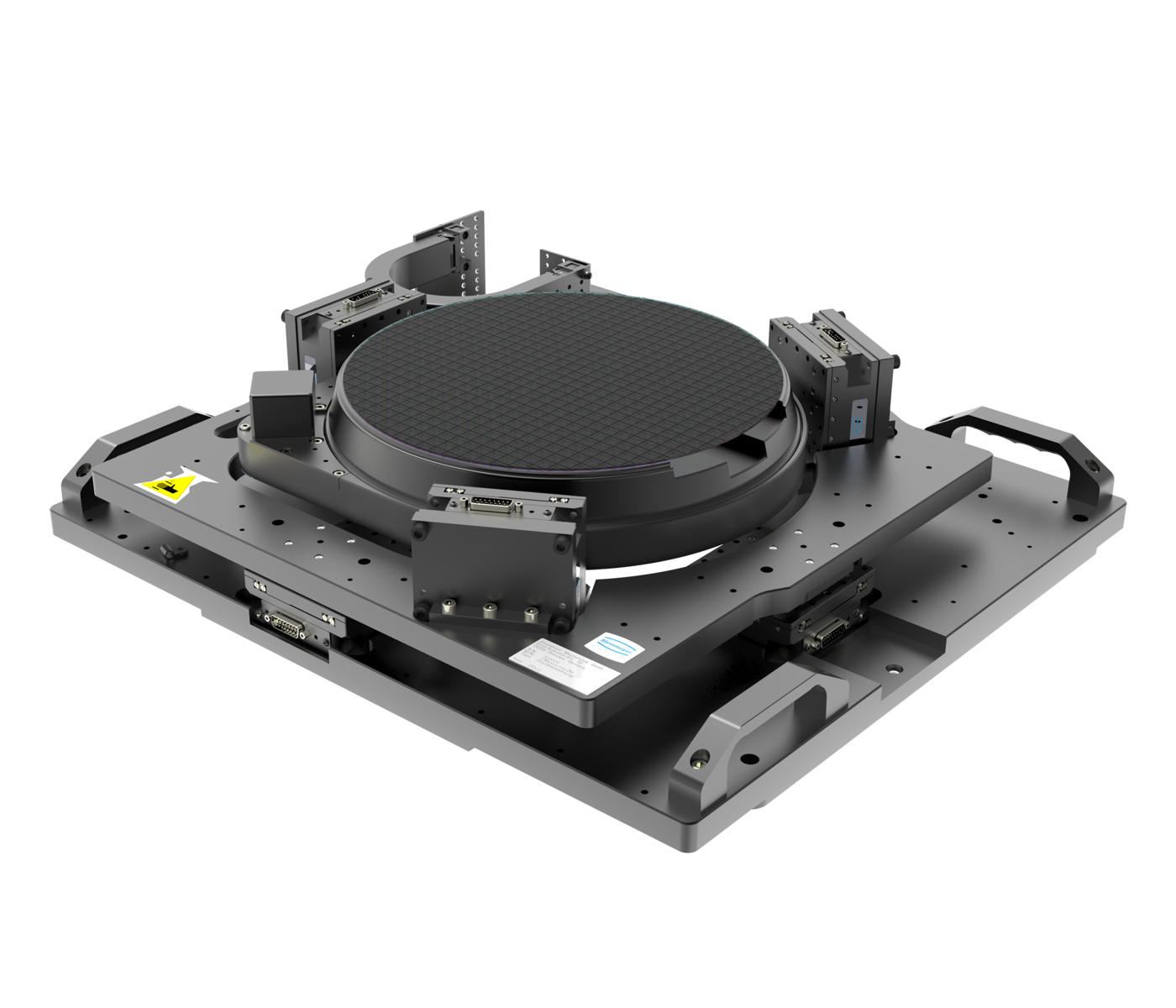

6-Achs-Ausrichtung von Wafern und Optiken bis 12"
Der 6-Achs-Manipulator besteht aus einem Kreuztisch in der Horizontalen sowie einem Tripod für Vertikalhub und zwei Kippungen und kombiniert damit die Stärken kartesischer und parallelkinematischer Konstruktionen in einem System. Die kartesische XY-Verstellung realisiert Verfahrwege von ± 15 mm, die Vertikalachse des Tripods ist für Hübe von ±10 mm ausgelegt. Die rotatorischen Achsen Rx und Ry ermöglichen Kippungen um ± 2°, die Drehung um die Vertikale Rz beträgt 360°.
Automatisierte Reinraum-Inspektion
|
|
|
|
Optionen:
|
Individuelle Erweiterungen und Anpassungen
Die Engineering-Leistungen umfassen die Anpassung der Systeme an Ihre Struktur und die gewünschten Steuerungen oder die ganz individuelle Lösungsfindung mit 3D-Entwurf für die anwendungsspezifische Positionieraufgabe.
Darüber hinaus entwickeln wir Prototypen und passen die Systeme gerne an die Umgebungsanforderungen Ihrer Anwendung an, z.B. Partikelemission, Strahlung, Temperatur, Präzisions-Sonderteilefertigung, Arbeitshöhe, Kollisionsschutz, Sicherheitskonzept, Kompensationsfaktor und -filter, Sensorhalterung, Bremse, Entkopplung, Sonderschmierung, Sonderfarben, Halter, Adapter, Sondermotoren mit Pharmazulassung, Umfangreiche Dokumentationen, Testprotokoll, Lebensdauertests
Anwendungsfelder
Halbleiterinspektion, Ausrichten, Alignment, Wafer, Optiken, Manipulator, Parallelkinematik, Testing und Bonding auf Wafern und PCB, Kombinationen von optischer Inspektion und Bearbeitung z.B. beim Chip-on-Board Bonding (Messmikroskop und Laserlöten)
| 786015:009.26 | X | Y | Z | Rx | Ry | Rz | |
| Standardsystem | MT95 | MT95 | 3x MT95 | 3x MT95 | 3x MT95 | ||
| Verfahrweg | [mm; deg] | 30 | 30 | 20 | 4 | 4 | 360 x n |
| Wiederholgenauigkeit unidirektional | [µm; deg] | ± 1.5 | ± 1.5 | ± 1.5 | 0.0004 | 0.0004 | 0.05 |
| Wiederholgenauigkeit bidirektional | [µm; deg] | ± 3.5 | ± 3.5 | ± 3.5 | 0.001 | 0.001 | 0.1 |
| Positioniergeschwindigkeit | [mm/s; deg/s] | 1.1 | 1.1 | 1.1 | 0.3 | 0.3 | 100 |
| Max. Geschwindigkeit | [mm/s; deg/s] | 2 | 2 | 2 | 0.5 | 0.5 | 200 |
| Max. Last | [N] | 65 | 65 | 100 | 65 | 65 | 20 |
| Motor | DC-Motor | DC-Motor | DC-Motor | DC-Motor | DC-Motor | Schrittmotor | |
| Antrieb | Kugelgewindetrieb 1112, Getriebe, Riemen | Kugelgewindetrieb 1112, Getriebe, Riemen | Kugelgewindetrieb 1112, Getriebe, Riemen | Kugelgewindetrieb 1112, Getriebe, Riemen | Kugelgewindetrieb 1112, Getriebe, Riemen | Riemen | |
| Feedback | Motor-Encoder | Motor-Encoder | Motor-Encoder | Motor-Encoder | Motor-Encoder | ohne | |
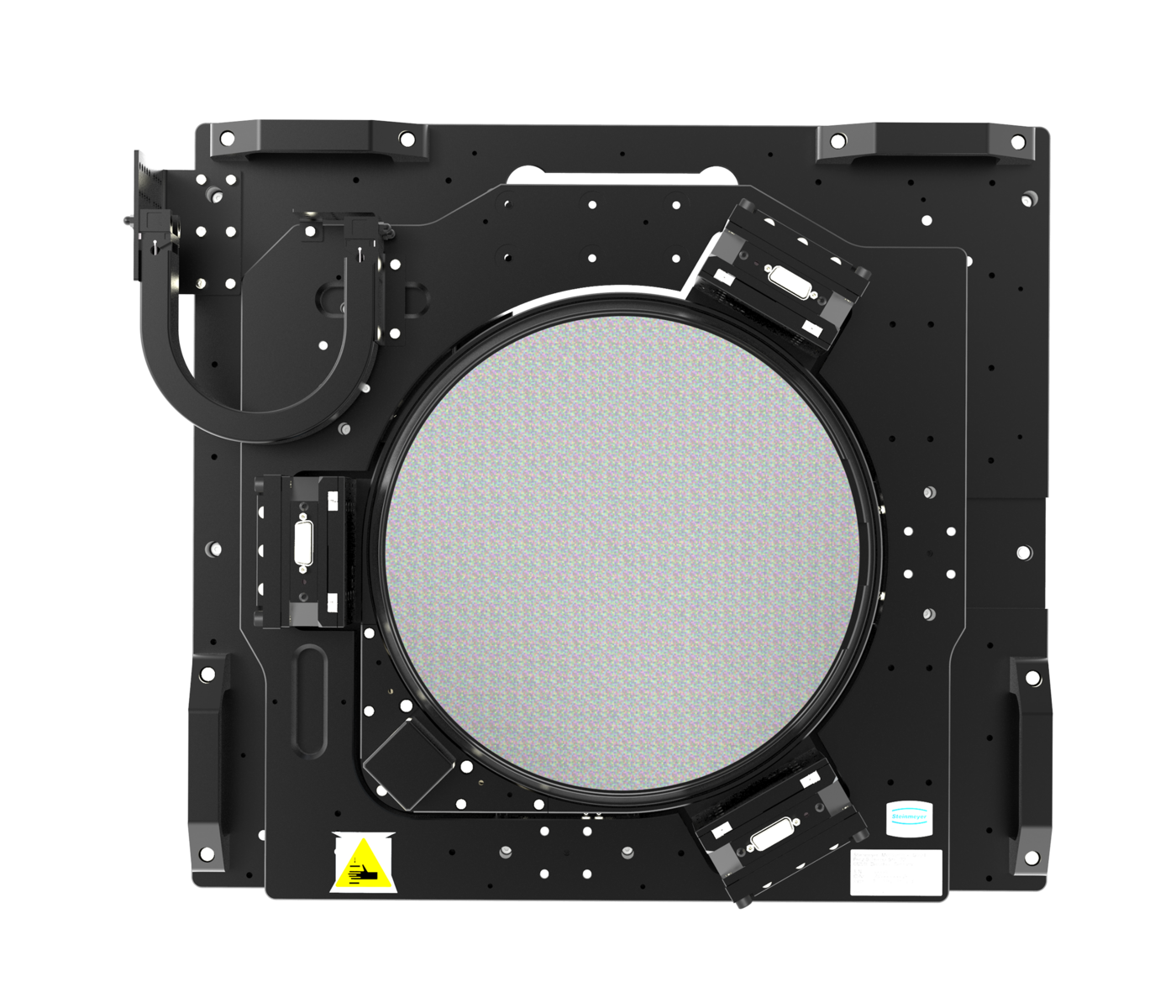
| Apertur Durchmesser | [mm] | 250 (optional größer als Sonderausführung) | |||||
| Max. Durchmesser der Probe | [mm] [inch] | 300 12 (450 mm / 18" optional als Sonderausführung) | |||||
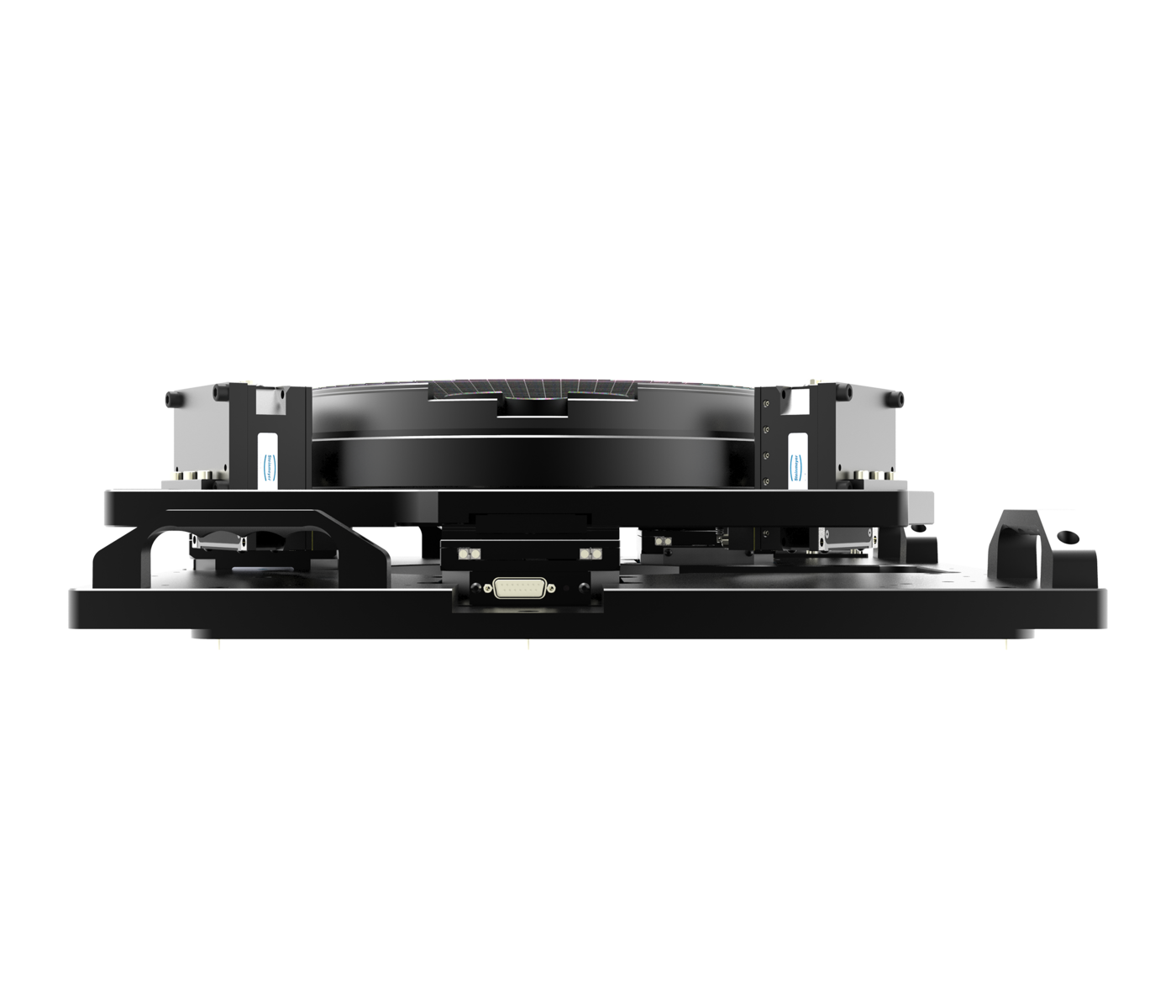
| Länge x Breite x Höhe | [mm] | 520 x 600 x 155 | |||||

Used Standard Components
MT95-DC
KGT 1112

Related Products
 | Hub XYZ 30 x 30 x 20 mm, RxRy 4°, Rz 360° - Inspektion und Mikroskopie")







Nahezu alle hier gezeigten atmosphärischen Achskombinationen sind uneloxiert mit UHV-Schmierung für Restdrücke bis 10E-6 mbar und min. Reinraum Klasse ISO 6 - oder noch besser - verfügbar. Weitere Stages für anpruchsvollere Umgebungen bis Reinraumklasse ISO 2, Vakuum bis 10E-11 mbar oder harte Strahlung finden Sie hier:
Übersicht Reinraum & Vakuum Stages Technischen Berater kontaktieren
Die Steinmeyer Mechatronik GmbH verwendet hauptsächlich Aluminium für die Struktur von Mehrachsigen Positioniersystemen, da es lokale Erwärmungen effizient abführt und schnell ein thermisch eingeschwungener Zustand entsteht. Das ist Voraussetzung für stabile, genau Systeme. Die geringere Steifigkeit von Aluminium gegenüber Stahl wird durch geringfügig größere Höhe der Tische oder die Verwendung von Hohlprofilen kompensiert. Beachte: Ein Balken aus Aluminium und einer aus Stahl hängen unter ihrer Gewichtskraft gleich stark durch!
In speziellen Fällen kommen auch Titan für magnetfreie Systeme zum Einsatz.
Welche Oberflächen sind verfügbar?
Optional sind verschiedene Oberflächen möglich. Je nach Einsatz sind eloxal gereinigt, alternative Farben, Aluminium gereinigt blank, Bilatal oder Nickel für optimale Prozesstauglichkeit (z.B. besonders hohe Reinheitsgrade, Beständigkeit gegen Reinigung mit Chemikalien im Bereich Life Science) erhältlich. Sonder-Oberflächen sind oft für den UV, DUV oder EUV (Röntgen, Gamma auf Anfrage) notwendig.
Je nach Anforderung können verschiedene Antriebssysteme verwendet werden. Erkennbar ist diese als Kürzel in der Namensbezeichnung darunter:
- Geschliffene Kugelgewindetriebe oder Gleitgewindetriebe mit SM-Motor (Schrittmotor), DC-Motor (Gleichstrommotor) oder AC-Servo (Wechselstrom-Servomotor).
- Elektrodynamische Linearmotoren (eisenlos oder eisenbehaftet).
- Piezomotoren wie Piezo-Legs® oder Nanomotion®.
Als Feedback-System werden in den meisten Mehrachs-Positioniersystemen inkrementelle Maßstäbe aus Stahl oder Zerodur® bzw. Zeromet® eingesetzt. Während dies für eine Genauigkeit im einstelligen Mikrometerbereich ausreichend ist, ist es bei Genauigkeitsforderungen unter einem Mikrometer sinnvoll, interferometrisches Positionsfeedback zu verwenden. Bei Systemen mit „open loop“, also ohne Messsystem, lässt sich nur eine Präzision im zweistelligen Mikrometerbereich erzielen; aufgrund des einfacheren Controllers und des fehlenden Messsystems ist dies aber die kostengünstigere Lösung.
Sie suchen eine technische Lösung für Ihre Anwendung?
Jetzt den ersten 3D Entwurf in nur wenigen Tagen erhalten:

Katja Weißbach
Beratung
T +49 351 88585-64
E-Mail

Ronald Schulze
Beratung, Projektmanagement
& Engineering
T +49 351 88585-67
E-Mail

Francisco Samuel
Beratung &
Projektmanagement
T +49 351 88585-85
E-Mail

Elger Matthes
Beratung, Konzepte, Innovation & Engineering
T +49 351 88585-82
E-Mail
Unsere Referenzen
