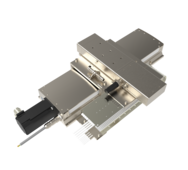
PLT165-DLM
Lineartische
High Performance Stage (Linearmotor), Hub 200 - 750 mm, Repro ± 0.4 µm, Last 6 kg, Speed 1155 mm/s

Robuster Präzisionstisch
Das Antriebskonzept dieses Lineartisches basiert auf einem Linearmotor und ermöglicht dadurch hohe Beschleunigungen und Geschwindigkeiten. Damit eignet sich der präzise Lineartisch ideal für horizontale Anwendungen, in welchen diese Eigenschaften gefordert werden.
Gemacht für industrielle Anwendungen
Mit einer Breite von 165 mm ist der PLT165 der schmalste Tisch seiner Baureihe. Er wird sowohl als Einzelachse als auch als Top-Achse in Mehrachssystemen verwendet. Das geschützte Gehäuse und die Metallbandabdeckung gewährleisten Staub- und Partikelschutz in industriellen Umgebungen.
Vielfältige Anwendungsfelder
Der PLT165 mit dynamischem Linearmotor eignet sich für alle Bereiche der Industrie, in denen die präzise Zustellung von Proben, Sensoren oder Optiken notwendig ist - beispielsweise in der Laserbearbeitung, Halbleitertechnik oder Messtechnik.
| PLT165 | -200-DLM-L | -300-DLM-L | -400-DLM-L | -500-DLM-L | -750-DLM-L | |
| Verfahrweg | [mm] | 200 | 300 | 400 | 500 | 750 |
| Wiederholgenauigkeit unidirektional | [μm] | ± 0.4 | ± 0.4 | ± 0.4 | ± 0.4 | ± 0.4 |
| Wiederholgenauigkeit bidirektional | [μm] | ± 0.5 | ± 0.5 | ± 0.5 | ± 0.5 | ± 0.5 |
| Positioniergenauigkeit | [μm] | ± 1.5 | ± 1.8 | ± 2 | ± 2.2 | ± 2.8 |
| Ebenheitsabweichung | [μm] | ± 6 | ± 9 | ± 12 | ± 15 | ± 25 |
| Geradheitsabweichung | [μm] | ± 3 | ± 4.5 | ± 6 | ± 7.5 | ± 11 |
| Positioniergeschwindigkeit | [mm/s] | 470 | 530 | 580 | 630 | 770 |
| Max. speed | [mm/s] | 705 | 795 | 870 | 945 | 1155 |
| Max. Beschleunigung | [m/s2] | 9.5 | 11 | 12 | 13 | 15 |
| Max. Last Fx | [N] | 60 | 60 | 60 | 60 | 60 |
| Max. Last Fy | [N] | 520 | 520 | 520 | 520 | 520 |
| Max. Last Fz | [N] | 520 | 520 | 520 | 520 | 520 |
| Max. Lastmoment Mx | [Nm] | 13 | 13 | 13 | 13 | 13 |
| Max. Lastmoment My | [Nm] | 19 | 19 | 19 | 19 | 19 |
| Max. Lastmoment Mz | [Nm] | 25 | 25 | 25 | 25 | 25 |
| Nicken | [µrad] | ± 30 | ± 35 | ± 40 | ± 45 | ± 55 |
| Gieren | [µrad] | ± 14 | ± 17 | ± 20 | ± 20 | ± 25 |
| Auflösung | [µm] | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
| L1 | [mm] | 500 | 600 | 700 | 800 | 1050 |



Verwandte Produkte




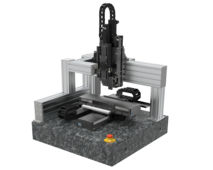
Hochlast Linearachse (Linear Motor), Hub bis 2000 mm, Repro ± 0.4 µm, Last bis 25 kg, Speed bis 3090 mm/s

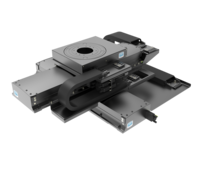
High Performance XY Stage (Linearmotor), Hub 500 x 400 mm, Repro ± 0.4 µm, Last 52 kg, Speed 870 mm/s

Nahezu alle hier gezeigten atmosphärischen Standardachsen sind uneloxiert mit UHV-Schmierung für Restdrücke bis 10E-6 mbar und min. Reinraum Klasse ISO 6 - oder noch besser - verfügbar. Weitere Stages für anpruchsvollere Umgebungen bis Reinraumklasse ISO 2, Vakuum bis 10E-11 mbar oder harte Strahlung finden Sie hier:
Übersicht Reinraum & Vakuum Stages Technischen Berater kontaktieren
Materialien
Die Steinmeyer Mechatronik GmbH verwendet überwiegend Aluminium für die Struktur mehrachsiger Positioniersysteme.
In speziellen Fällen sind Stahl und auch Titan (z. B. magnetfreie Systeme) möglich.
Der Grund: Aluminium führt lokale Erwärmungen effizient ab, sodass sich das System schnell in einen thermisch eingeschwungenen Zustand einstellt – eine wesentliche Voraussetzung für stabile und hochgenaue Positioniersysteme.
Die geringere Steifigkeit von Aluminium im Vergleich zu Stahl wird konstruktiv kompensiert, z. B. durch:
- eine leicht erhöhte Bauhöhe der Tische
- den Einsatz von Hohlprofilen
Wichtig: Ein Aluminium- und ein Stahlbalken mit identischer Geometrie weisen unter Eigengewicht die gleiche Durchbiegung auf. Für spezielle Anforderungen – z. B. magnetfreie Anwendungen – kommen auch Titan-Ausführungen zum Einsatz.
Funktionale Oberflächen und Beschichtungen
Neben Standardoberflächen stehen zahlreiche kundenspezifische Oberflächen- und Beschichtungskonzepte zur Verfügung.
Diese sind gezielt darauf ausgelegt, sehr hohe Reinraumklassen zu erreichen – bis ISO 1–2, abhängig von Anwendung und Prozess.
Zur Erfüllung anspruchsvoller Prozessanforderungen entwickeln und qualifizieren wir anwendungsspezifische Funktionsbeschichtungen, unter anderem:
- Nickel-Beschichtungen
- PTFE- & KEPLA®-Beschichtungen
- Fluorierte Schmierstoffe
- Dicronite® / Dry-Film-Beschichtungen
- Applikationsspezifische Beschichtungs-Kombinationen
Darüber hinaus sind verfügbar:
- eloxiert (gereinigt)
- alternative Farb-Eloxale
- Aluminium blank, gereinigt
- Bilatal
- Nickel
Diese Oberflächen eignen sich z. B. für hohe Reinheitsanforderungen, chemische Beständigkeit (Life Science) oder prozesskritische Umgebungen.
Warum Funktionsbeschichtungen entscheidend sind (Vorher → Nachher)
- Standardoberfläche → EUV-taugliche Oberfläche
- Reflektierend → nicht reflektierend, minimiertes Streulicht
- Begrenzte Gleitfähigkeit → maximales Gleiten & reduzierter Verschleiß
- Basisschutz → chemische & korrosive Beständigkeit
- One-size-fits-all → kostenoptimierte, applikationsspezifische Performance
Sonderoberflächen sind häufig erforderlich für UV / DUV / EUV-Anwendungen (Röntgen- oder Gamma-Anwendungen auf Anfrage).
Ja, Lineartische können auch als Hubtische (Z-Richtung) sowie gestapelt (XY-Bewegungen verwendet werden).
Wichtig dafür ist, dass die maximale Kraft in Antriebsrichtung nicht überschritten wird. Die Kraft für die vertikale Positionierung wird in der Spezifikation bei Linear Stages unter Fx angegeben.
Die Auswahl basiert primär auf Kraftbedarf, Dynamik und erforderlicher Präzision. Zusätzlich relevant sind Bauraum, Energieeffizienz, thermische Randbedingungen und Integrationsaufwand. Je nach Anforderung können verschiedene Antriebssysteme verwendet werden. Erkennbar sind diese als Kürzel in der jeweiligen Namensbezeichnung:
- Geschliffene Kugelgewindetriebe oder Gleitgewindetriebe mit SM-Motor (Schrittmotor), DC-Motor (Gleichstrommotor) oder AC-Servo (Wechselstrom-Servomotor)
- Elektrodynamische Linearmotoren (eisenlos oder eisenbehaftet)
- Piezomotoren wie Piezo-Legs® oder Nanomotion®
Systematische Entscheidungsstruktur
| Wenn Priorität liegt auf … | Dann typischer Motortyp |
|---|---|
| Kosten & einfache Integration | Schrittmotor |
| Dynamik & Regelgüte | DC-Servo / BLDC |
| Höchste Dynamik & Spielfreiheit | Linearmotor |
| Nanopositionierung & Kompaktheit | Piezo / Nanomotion / Ultrasonic |
1. Schrittmotor
Typische Anwendung
Einfache Positionieraufgaben mit moderaten Geschwindigkeiten und Kräften.
Vorteile
- Kostengünstig
- Einfache Ansteuerung (oft ohne komplexe Regelung)
- Gute Haltekraft im Stillstand
Nachteile
- Schrittverluste bei Überlast (ohne Feedback)
- Geringere Laufruhe bei niedrigen Drehzahlen
Empfohlen für
- Standardachsen
- Laborautomatisierung
- Einfache Verstellaufgaben
- Justageeinheiten mit geringem Dynamikbedarf
- Vakuumanwendungen
2. DC-Servo oder BLDC-Motor
Typische Anwendung
Dynamische Positionierung mit geschlossenem Regelkreis und Encoder-Feedback.
Vorteile
- Sehr gleichmäßiger Lauf
- Hohe Drehzahl und Beschleunigung
- Präzise Regelung durch Feedback
Nachteile
- Höhere Systemkosten
- Erfordert Servoregler und Parametrierung
Empfohlen für
- Schnelle XY-Tische
- Scan-Achsen
- Automationssysteme mit Positions- und Geschwindigkeitsregelung
- Mehrachssysteme mit Synchronisation
3. Linearmotor
Typische Anwendung
Direktantrieb ohne mechanische Übertragung für maximale Dynamik.
Vorteile
- Kein Spiel, kein mechanischer Verschleiß
- Extrem gleichmäßige Bewegung
- Sehr hohe Beschleunigungen
Nachteile
- Höhere Investitionskosten
- Erhöhter Energiebedarf
- Thermisches Management erforderlich
Empfohlen für
- Hochdynamische Systeme in der Halbleiterfertigung
- Inspektions- und Metrologiesysteme
- Präzisionsmontage
- Anwendungen mit hohen Taktzahlen
4. Piezo-, Nanomotion oder Ultrasonic-Motor
Typische Anwendung
Nanometerbewegungen oder hochkompakte Präzisionssysteme.
Vorteile
- Keine magnetischen Felder
- Extrem feine Schrittweiten
- Hohe Haltekraft ohne Energiezufuhr
Nachteile
- Begrenzte Stellwege
- Niedrige bis moderate Geschwindigkeit
- Nicht für hohe Dauerlast ausgelegt
Empfohlen für
- Nanopositioniersysteme
- Optikjustage und Feinabgleich
- Mikroskopie und Laser-Alignment
- Vakuum- oder magnetfeldkritische Anwendungen
- Kompakte Systeme mit minimalem Bauraum
Als Feedback-System werden in den meisten Fällen inkrementelle Maßstäbe aus Stahl oder Zerodur® bzw. Zeromet® eingesetzt. Während dies für eine Genauigkeit im einstelligen Mikrometerbereich ausreichend ist, ist es bei Genauigkeitsforderungen unter einem Mikrometer sinnvoll, interferometrisches Positionsfeedback zu verwenden. Bei Systemen mit „open loop“, also ohne Messsystem, lässt sich nur eine Präzision im zweistelligen Mikrometerbereich erzielen; aufgrund des einfacheren Controllers und des fehlenden Messsystems ist dies aber die kostengünstigere Lösung.
Steinmeyer bietet Standard-Motion-Controller, SPS-Integration sowie kundenspezifische Embedded-Lösungen. Die Steuerung kann – je nach Anwendung – vollständig in das Positioniersystem integriert werden.
Übersicht Motion Controller & Steuerungskonzepte
Systemarchitektur – modular aufgebaut
Steuerungslösungen werden applikationsspezifisch ausgewählt und auf Antrieb, Messsystem sowie Umgebungsbedingungen abgestimmt.
Standard-Motion-Controller
- Für Einzel- oder Mehrachssysteme
- Parametrierbare Regelkreise (Position / Geschwindigkeit / Drehmoment)
- Feldbus-Schnittstellen (z. B. EtherCAT, PROFINET)
- Schnelle Inbetriebnahme
Typische Anwendung: Präzisionsachsen mit Linearmotor, Torque Motor oder Kugelgewindetrieb.
SPS-Integration
- Einbindung in bestehende Maschinensteuerungen
- Zentrale Anlagenlogik über kundenseitige SPS
- Reduzierter Integrationsaufwand
- Standardisierte Industriekommunikation
Typische Anwendung: OEM-Maschinen, skalierbare Anlagen und Retrofit-Projekte.
Kundenspezifische Embedded-Lösungen
- Kompakte, applikationsoptimierte Controller
- Integrierte Leistungsendstufen
- Minimierter Bauraum
- Optimiert für prozessspezifische Anwendungen
Typische Anwendung: Hochintegrierte Positioniersysteme mit begrenztem Bauraum oder speziellen Umweltanforderungen.
Sie suchen eine technische Lösung für Ihre Anwendung?
Jetzt den ersten 3D Entwurf in nur wenigen Tagen erhalten:

Katja Weißbach
Beratung
T +49 351 88585-64
E-Mail

Ronald Schulze
Beratung, Projektmanagement
& Engineering
T +49 351 88585-67
E-Mail

Francisco Samuel
Beratung &
Projektmanagement
T +49 351 88585-85
E-Mail

Elger Matthes
Beratung, Konzepte, Innovation & Engineering
T +49 351 88585-82
E-Mail

Unsere Referenzen