6-Achs Wafer / Probecard Aligner
Inspektion und Mikroskopie
786015:001.26



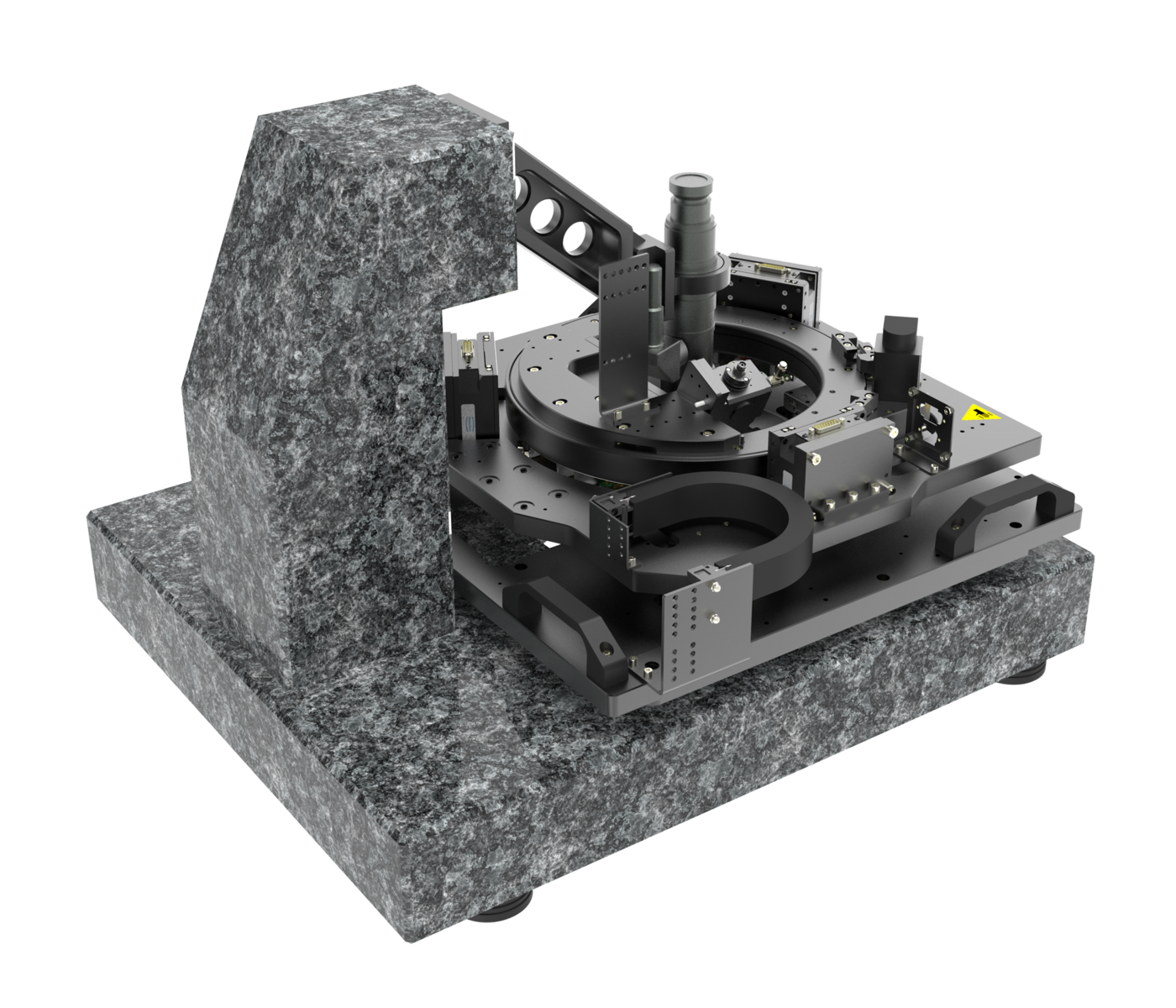
6-Achs-Positionierung für Halbleiter
Dieses 6-Achsen-Positioniersystem ermöglicht präzise und hochkompakte Ausrichtung eines schweren Messkopfes z.B. Mikroskop und der Probe zueinander. Es wird direkt auf eine vorhandene kundenspezifische Maschinenbasis (Wafer Prober) aufgesetzt. Das Mikroskop ist an einer Traverse über den Aligner angebracht. Dieser besteht aus einem Kreuztisch in der Horizontalen sowie einem Tripod für Vertikalhub und zwei Kippungen und kombiniert damit die Stärken kartesischer und parallelkinematischer Konstruktionen in einem System und kontinuierlicher Drehung um Z.
|
|
|
Optionen:
|
Anwendungsfelder
Halbleiterinspektion, MEMS-Prober Testing, Ausrichten, Alignment, Wafer, Optiken, Manipulator, Parallelkinematik, Testing und Bonding auf Wafern und PCB, Kombinationen von optischer Inspektion und Bearbeitung z.B. beim Chip-on-Board Bonding (Messmikroskop und Laserlöten)
786015:009.26 | X | Y | Z | Rx | Ry | Rz | |
Standardsystem |
| MT95 | MT95 | 3x MT95 | 3x MT95 | 3x MT95 | |
[mm; deg] | 30 | 30 | 20 | 4 | 4 | 360 x n | |
[µm; deg] | ± 1.5 | ± 1.5 | ± 1.5 | 0.0004 | 0.0004 | 0.05 | |
[µm; deg] | ± 3.5 | ± 3.5 | ± 3.5 | 0.001 | 0.001 | 0.1 | |
[mm/s; deg/s] | 1.1 | 1.1 | 1.1 | 0.3 | 0.3 | 100 | |
| Max. Geschwindigkeit | [mm/s; deg/s] | 2 | 2 | 2 | 0.5 | 0.5 | 200 |
[N] | 65 | 65 | 100 | 65 | 65 | 20 | |
Motor |
|
| Schrittmotor | ||||
Antrieb |
| Kugelgewindetrieb 1112, Getriebe, Riemen | Kugelgewindetrieb 1112, Getriebe, Riemen | Kugelgewindetrieb 1112, Getriebe, Riemen | Kugelgewindetrieb 1112, Getriebe, Riemen | Kugelgewindetrieb 1112, Getriebe, Riemen | Kugelgewindetrieb 1112, Riemen |
Feedback | Motor-Encoder | Motor-Encoder | Motor-Encoder | Motor-Encoder | Motor-Encoder | ohne | |
| Apertur Durchmesser | [mm] | 250 (optional größer als Sonderausführung) | |||||
| Max. Durchmesser der Probe | [mm] [inch] | 300 12 (450 mm / 18" optional als Sonderausführung) | |||||
| Länge x Breite x Höhe | [mm] | 720 x 600 x 552 | |||||

Verwendete Standard Komponenten
MT95-DC
KGT 1214

Verwandte Produkte
 | XY Linearmotor, Profilschiene | Z Kreuzrolle, Kugelgewindetrieb | Phi Zahnriemen, DC-Motor | Hub 450 x 350 x 16 mm x 45° - XY Theta System")
 | Tripod, Drehtisch, XY- Stage, Hexapod Alternative | Hub XYZ 30 x 30 x 20 mm, RxRy 4°, Rz 360° - XYZ Tip-Tilt System")
 | XY Linearmotor, Profilschiene | Theta Zahnriemen, DC-Motor | Hub 300 x 300 mm x 360° - XY Theta System")
Sie suchen eine technische Lösung für Ihre Anwendung?
Jetzt den ersten 3D Entwurf in nur wenigen Tagen erhalten:

Katja Weißbach
Beratung
T +49 351 88585-64
E-Mail

Ronald Schulze
Beratung, Projektmanagement
& Engineering
T +49 351 88585-67
E-Mail

Francisco Samuel
Beratung &
Projektmanagement
T +49 351 88585-85
E-Mail

Elger Matthes
Beratung, Konzepte, Innovation & Engineering
T +49 351 88585-82
E-Mail

Unsere Referenzen